

 ��ϵ����
��ϵ����

1������ͼ��ϣ��ABB��������1-8λ�ò�Ʒ��������ɫ���ﵽͼ��Ч��

2��ʵ�ַ�����
A����ȡλ��2,���õ����ɵ㣬
��λ��8��ȡ�����õ�λ��2��
�ӹ��ɵ���ȡ�����õ�λ��8
B����ȡλ��5�����õ�3
C����ȡλ��4�����õ�6
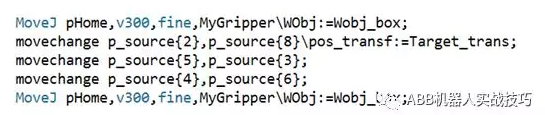
3�� ���Դ��������������г���movechange pos1,pos2\pos_transf��=target_transf
���з�б�ܱ�ʾ��ѡ������
�����ѡ���˿�ѡ����pos_transf�����ָ���ʾ����target_transfλ�ã���pos1��pos2����
���û��ѡ��б��\pos_trans�����pos1��ȡ�����õ�pos2
4����������������ָ�����£�
��ѡ������ѡ�����£�
���movechange
������½ǿ�ѡ���������use
��������

���������������г����� ��ԭ�����������������г���
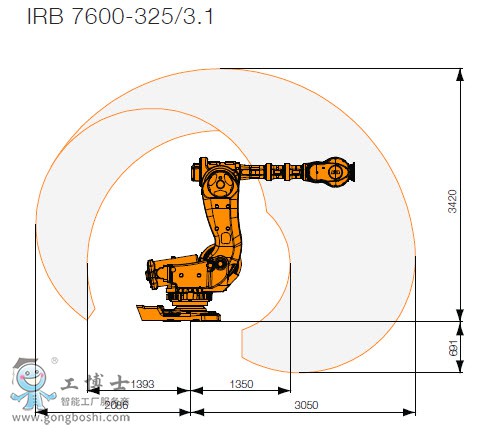
ABB������IRB 7600
���ʻ�����

|
机器人版� |
到达距离 |
承重能力 |
重心 |
手腕�€大转� |
|
IRB 7600-500 |
2.55 m |
500 kg |
360 mm |
3010 Nm |
|
IRB 7600-400 |
2.55 m |
400 kg |
512 mm |
3010 Nm |
|
IRB 7600-340 |
2.80 m |
340 kg |
360 mm |
2750 Nm |
|
IRB 7600-325 |
3.10 m |
325 kg |
360 mm |
2680 Nm |
|
IRB 7600-150 |
3.50 m |
150 kg |
360 mm |
1880 Nm |
|
IRB 7600-150 (loaded with 100 kg) |
|
|
1660 mm |
|