

 联系我们
联系我们

1) 如果有下图两个产品,ABB机器人已经完成了右边产品轨迹,左边产品估计一样,如何快速生成左边轨迹(左边产品可能有平移和旋转)
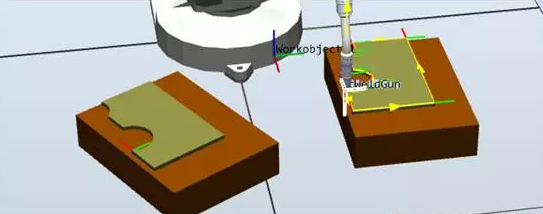
2)完成右边轨迹示教Path_30,如上图。起点为Target_20。
3) 完成左边起点的示教,为Target_ref_start,如下图。
注:如果左边产品轨迹有旋转,示教的Target_ref_start相对于左边产品的姿态要和Target_20相对于右边产品的姿态一致(此处左边产品旋转了30°,示教的角度z方向也旋转了30°)
4) 插入指令如下
MoveJ pHome,v1000,z100,tWeldGun\WObj:=wobj0;//移动到Home位置
Path_30;//运行右边产品轨迹
MoveJpHome,v1000,z100,tWeldGun\WObj:=wobj0;//回到Home
MoveJTarget_ref_start,v1000,fine,tWeldGun\WObj:=wobj0;//走到左边产品起点
ConfJ\Off;//因为使用偏移,关闭轴配置监控,否则有可能使用原配置参数导致位置走不到而报错 ConfL\Off; //因为使用偏移,关闭轴配置监控,否则有可能使用原配置参数导致位置走不到而报错
PDispOn\Rot,Target_20,tWeldGun;//设定当前位置和Target_20的偏差关系(包括平移和旋转),因为此时机器人停在Target_ref_start起点,即设定左边轨迹和右边轨迹的整体偏移关系。使用\rot表示平移和旋转均计算。如果不使用\rot,则只使用平移,旋转不计算
Path_30;//运行原有轨迹,此时轨迹参考坐标移动关系,机器人实际走左边产品轨迹
PDispOff;//轨迹完成,关闭平移关系
MoveJ pHome,v1000,z100,tWeldGun\WObj:=wobj0;
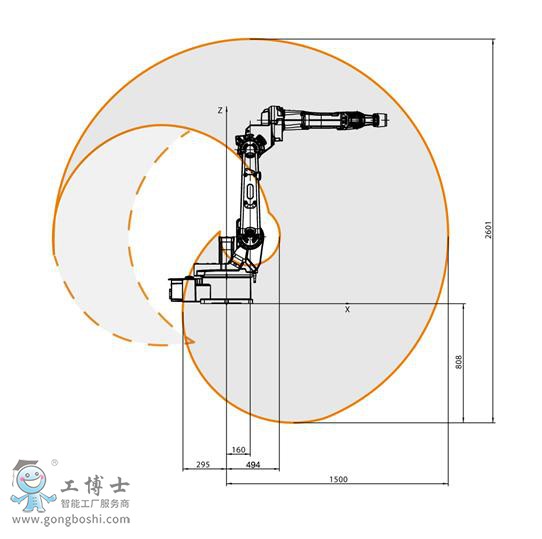
ABB机器人IRB 1520ID
ABB新型机器人IRB 1520ID是一款高精度中空臂弧焊机器人 (集成配套型),能够实现连续不间断地生产,可节省高达50%的维护成本,与同类产品相比,焊接单位成本*低。
焊接稳定性增强
中空臂机器人IRB 1520ID(集成配套型)将软管束与焊接电缆分别同上臂和底座紧密集成。电源、焊丝、保护气、压缩空气等弧焊所需的介质采用这种方式走线,可实现性能与能效的*优化。除了焊接稳定性强以外,IRB 1520ID兼具路径精度高、节拍时间短、管线寿命长等诸多优势。得益于集成配套式设计,该机器人在焊接圆柱形工件时,动作毫无停顿,一气呵成;而在窄小空间内,该机器人同样行动自如,游刃有余。
安装灵活
IRB 1520ID有效负载4千克,工作范围1.5米,设计高度紧凑,可灵活选择落地安装或倒置安装,有利于缩短节拍时间,拓宽应用范围。
卓越的精度与速度
ABB机器人以其卓越的运动控制而闻名。IRB 1520ID配备第二代TrueMove™技术,在同等级轻型弧焊机器人中拥有*优异的路径精度;该机型还配备第二代QuickMove™技术,实现了两次焊接间的加速度*大化,在显著提升产能的同时,又将能耗降至*低。
易于操作和编程
通过直观友好的FlexPendant(示教器),可轻松完成机器人及弧焊工艺的编程与维护。示教器采用通行的PC图形界面,无论控制机器人还是特定工艺设备,操作员都绝无陌生感。示教器还配备触摸屏及ABB**的操纵杆,进一步提升了操控速度及便利性。为了让用户充分享受离线模拟编程的优势,ABB还提供广受追捧、可靠性和性价比超高的软件包——RobotStudio™和RobotStudioArcWelding PowerPac,其内置的弧焊专用程序VirtualArc™是虚拟试错的得力工具。只需短短数小时的安装调试,机器人即可按预定的节拍时间和焊接质量投入生产。
主要应用:
弧焊、上下料、物料搬运
数据表
IRB 1520ID 产品特征及说明

 更多产品信息,请点击关注:ABB机器人
更多产品信息,请点击关注:ABB机器人
图文来源网络,侵删
- 下一篇:机器人是“刚性需求”
- 上一篇:ABB机器人指令——位置互换