

 联系我们
联系我们

贰——PLC端操作如下
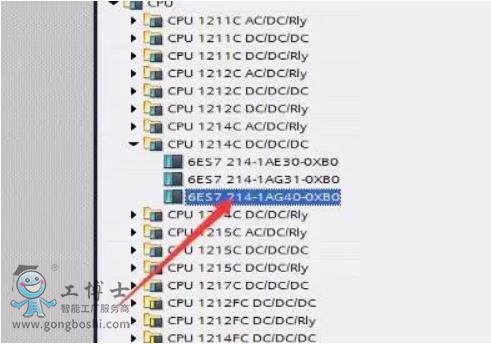
1.打开博图V15组态画面拖入一台1200PLC
2.点击PLC的网口设置IP地址如图192.168.10.1

3.安装ABB机器人GSD文件(1工具,2选项,3管理通用站文件描述,4选择GSD文件所在位置5安装)图4

4.添加机器人设备(1其他现场设,2profinet IO,3 I/O, 4 ABBROBOTICS,5robot device,6basic v1.3 7拖入网络视图)图5

5.将PLC和机器人的网口用线连接起来。图6

6.双击机器人设备网口将机器人的IP设置为plc的同一网段图7

7.并配置发送与接收数据包,这里选择发8个字节,收8个字节。图8

8.查看映射地址图

映射地址为 PLC端的IB100到IB107 对应机器人端的QB256到QB263机器人端的IB256到IB263 对应PLC端的QB100到QB107
9.编写PLC端的发送和接收程序。

将PLC端IW100发送到机器人的QW256
PLC端IW102发送到机器人的QW258图11

将机器人端发送过来的数据会接收在QB100里面,到此PLC端设置已经全部完成。
1.打开博图V15组态画面拖入一台1200PLC
2.点击PLC的网口设置IP地址如图192.168.10.1
3.安装ABB机器人GSD文件(1工具,2选项,3管理通用站文件描述,4选择GSD文件所在位置5安装)图4
4.添加机器人设备(1其他现场设,2profinet IO,3 I/O, 4 ABBROBOTICS,5robot device,6basic v1.3 7拖入网络视图)图5
5.将PLC和机器人的网口用线连接起来。图6
6.双击机器人设备网口将机器人的IP设置为plc的同一网段图7
7.并配置发送与接收数据包,这里选择发8个字节,收8个字节。图8
8.查看映射地址图
映射地址为 PLC端的IB100到IB107 对应机器人端的QB256到QB263机器人端的IB256到IB263 对应PLC端的QB100到QB107
9.编写PLC端的发送和接收程序。
将PLC端IW100发送到机器人的QW256
PLC端IW102发送到机器人的QW258图11
将机器人端发送过来的数据会接收在QB100里面,到此PLC端设置已经全部完成。
更多资讯:ABB机器人配件