

 БӘПөОТГЗ
БӘПөОТГЗ


PC SDKІўОҙМṩABB»ъЖчИЛКөјКФЛРРЛЩ¶И***ЦөөДКдіцҪУҝЪЎЈ
ҝЙТФАыУГ»ъЖчИЛПөНіКдіцTCPSpeedЈ¬№ШБӘПа№ШДЈДвБҝКдіцРЕәЕЎЈЙПО»»ъАыУГSignal Value ChangedКВјю¶©ФДёГРЕәЕөДұд»ҜІў№ШБӘөҪНјРО»ҜҝШјюЎЈ
ҙҙҪЁРйДвДЈДвБҝКдіцРЕәЕao_speedЈ¬ИзПВНјЎЈІў№ШБӘёГРЕәЕөҪПөНіКдіцTCP SpeedЙПЈ¬
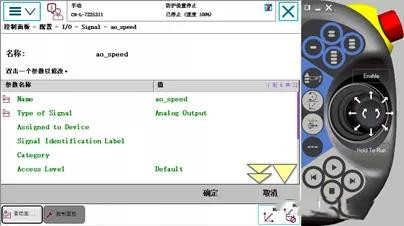
ОӘёьәГөДПФКҫЛЩ¶Иұд»ҜЈ¬ҝЙТФІЙУГHslCommunicationөДUserGaugeChartҝШјюЈ¬ИзОДКЧөДТЗұнЕМЎЈҝЙТФФЪVisual StudioЦРөДNuGet№ЬАнЖчЦРПВФШHslCommunicationЈ¬»тХЯФЪПВНјҙтҝӘіМРт°ь№ЬАнЖчҝШЦЖМЁЈ¬ІўЗТКдИлInstall-Package HslCommunicationҪшРР°ІЧ°ЎЈ°ІЧ°НкұПәуЈ¬ФЪөұЗ°ПоДҝ¶ФУҰОДјюјРөДPackageОДјюјРПВХТөҪHslCommunication.dllЈ¬НПИлVisual StudioөД№ӨҫЯПдЎЈ
ФЪҙ°МеіМРтЦРНП¶ҜUserGaugeChartҝШјюЈ¬ІўЙиЦГПаУҰөДMAXЦөәНMINЦөКэҫЭЎўұЁҫҜКэҫЭЎўөҘО»өИ(ХвАпјЩЙи»ъЖчИЛөДЛЩ¶ИMAXОӘ1000mm/s)ЎЈФЪЙПО»»ъ¶ЛЈ¬»ъЖчИЛөЗВјөҪ»ъЖчИЛҝШЦЖЖчәуЈ¬МнјУAO_speedРЕәЕ¶©ФДЈ¬ҙъВлИзПВЎЈЖф¶Ҝ»ъЖчИЛәуЈ¬ҝЙТФҝҙөҪ»ъЖчИЛөДКөКұЛЩ¶И
voidsubscribe()
{
Signal sigspeed =controller.IOSystem.GetSignal("ao_speed");
sigspeed.Changed += newEventHandler
}
privatevoidsig_Changed(object sender,SignalChangedEventArgs e)
{
this.Invoke(new EventHandler(UpdateGUIsig), sender, e);
//ОӘБЛұЬГвҪзГжПЯіМәНЦчПЯіМіеН»Ј¬ІЙУГОҜНР·ҪКҪ
}
privatevoid UpdateGUIsig(object sender,System.EventArgs e)
{
Signal s = (Signal)sender;
userGaugeChart1.Value =Math.Round(s.Value*1000);
//TCP SpeedКдіцОӘ m/sЈ¬ҙЛҙҰЧӘ»ҜОӘmm/sЈ¬јҙіЛТФ1000ЎЈПФКҫКэҫЭИЎХыЎЈ
}
ТФЙПДЪИЭЧӘФШУЪНшВз
ёь¶аЈәABB»ъЖчИЛ