

 联系我们
联系我们

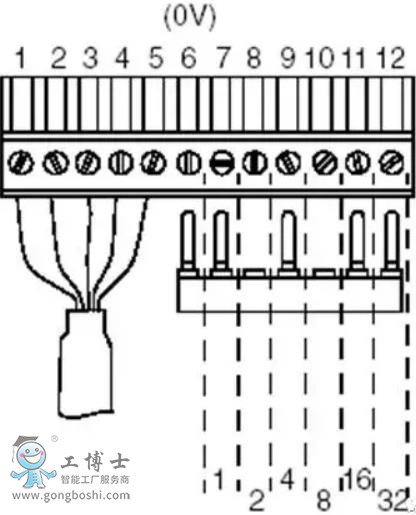
1)以DSQC652为例(16进16出)
2)上部区域为输出16个点,其中9和10针脚的0v,24v需要从柜门旁边的XT31引过来
3)下部区域为16个输入点,9号针脚的0v需要从XT31引过来

4)左侧区域短接片为地址位,默认为10,如下图(剪掉的为1,留下的是0,高电平有效)。如果要修改板卡地址,在这里修改,机器人里也要做对应配置
5)
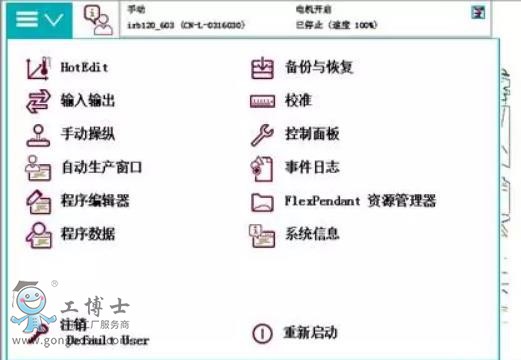
6)控制面板,配置,找到devicenetdevice,添加(如果已经显示添加,则不需要再添加)

7)模板选择652,地址根据前面短接片设置,默认为10
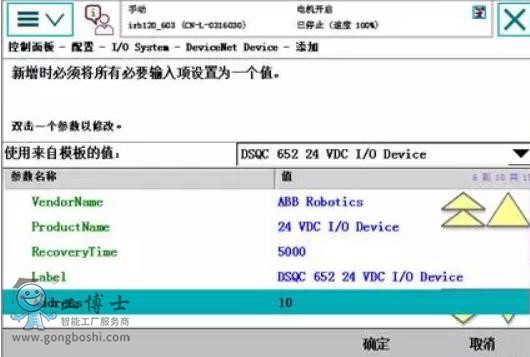
8)确定后,暂时不重启,全部配置完再一起重启
9)进入Signal,点击添加
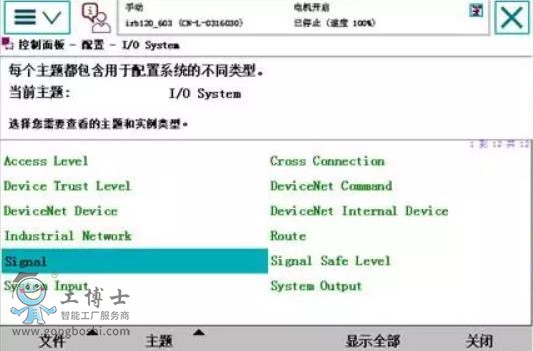
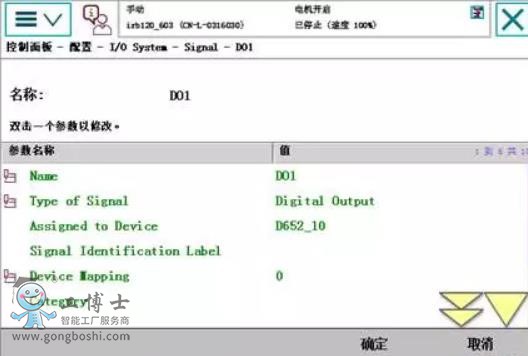
10) 举例,一个输出设置如下
设置name,type选择digital output,assigneddevice选择刚配置好的板卡,设置mapping。注意,实际接线1号针脚,这里地址为0.以此类推
11) 完成所有配置后,重启
12) 可以在输入输出查看
13)视图选择 IO设备,选择对应设备,点击信号
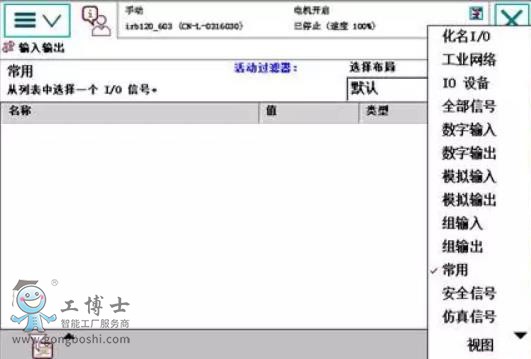

14) DO信号可以强制,即点击下方0或者1
更多资讯:ABB工业机器人
2)上部区域为输出16个点,其中9和10针脚的0v,24v需要从柜门旁边的XT31引过来
3)下部区域为16个输入点,9号针脚的0v需要从XT31引过来
4)左侧区域短接片为地址位,默认为10,如下图(剪掉的为1,留下的是0,高电平有效)。如果要修改板卡地址,在这里修改,机器人里也要做对应配置
5)
6)控制面板,配置,找到devicenetdevice,添加(如果已经显示添加,则不需要再添加)
7)模板选择652,地址根据前面短接片设置,默认为10
8)确定后,暂时不重启,全部配置完再一起重启
9)进入Signal,点击添加
10) 举例,一个输出设置如下
设置name,type选择digital output,assigneddevice选择刚配置好的板卡,设置mapping。注意,实际接线1号针脚,这里地址为0.以此类推
11) 完成所有配置后,重启
12) 可以在输入输出查看
13)视图选择 IO设备,选择对应设备,点击信号
14) DO信号可以强制,即点击下方0或者1
更多资讯:ABB工业机器人
- 下一篇:ABB机器人多任务使用方法
- 上一篇:ABB机器人与相机通讯技巧