

 联系我们
联系我们

2.3.1 故障排除策略
隔离故障!
任何失败都会导致许多症状,可能会创建错误事件日志消息,也可能不会创建这些症状。
为了有效地消除故障,区分主要症状和次要症状是很重要的。
帮助疑难解答可在第34页创建历史故障日志!节创建历史错误
日志。
将故障链一分为二!
在对任何系统进行故障排除时,尽量是将故障链分为两半。这意味着:
• 标识完整的链。
• 在链的中间确定和测量预期值。
• 使用此预期值确定哪一半造成该故障。
• 将这一半再分为两半,以此类推。
• 可能需要隔离一个组件。有故障的部件。
示例
特定的IRB 7600 安装具有一个12 VDC 电源为操纵器手腕带的工具供电。检查时,
此工具无法工作,它没有12 VDC 的电源。
• 检查操纵器底座是否有12 VDC 的电源。测量显示没有12 VDC 电源。(参考
资料:产品手册- IRC5中的“电路图”部分)
• 检查控制器中的操纵器和电源之间的所有连接器。测量显示没有12 VDC 电源。
(参考资料:产品手册- IRC5 中的“电路图”部分)
• 检查电源单元的LED。
选择通信参数和电缆!
串行通信中常见的错误原因为:
• 有故障的电缆(如,发送和接收信号相混)
• 传输率(波特率)
• 不正确设置的数据宽度。
检查软件版本!
确保系统运行的RobotWare和其他软件是正确的版本。有些版本与某些硬件组合不兼容。
同时,跟踪所有正在运行的软件版本,因为这对ABB的支持人员非常有用。
有关如何向当地ABB维修人员提交完整的错误报告的更多信息,请参阅第35页的错误报告提交。
2.3.2 系统地工作
不要随机更换单元!
更换任何部件之前,确定该故障的原因并进而确定要更换的单元,这点很重要。
随机更换单元有时可能会解决紧急的问题,但也会给故障排除人员留下许多工作状况欠佳的单元。
一次只更换一个单元!
在替换已隔离的可疑故障单元时,一次只替换一个单元是很重要的。
请确保按照现有机器人或控制器产品手册“修理”部分所述更换部件。
更换后测试系统,看看问题是否已经解决。
如果一次更换几个单元:
• 无法确定造成该故障的单元。
• 使订购新的备用件变得更复杂。
• 可能会给系统带来新的故障。
环顾四周!
通常,在您观察周围情况时会很容易发现原因。在出错设备所在的区域,务必检查:
• 紧固螺丝是否固定?
• 所有连接器是否固定?
• 所有电缆是否无破损?
• 设备是否清洁(对于电气设备尤其如此)?
• 设备是否正确装配?
检查缺少的工具!
一些维修和维护工作需要使用专门用于装配机器人设备的工具。如果缺少这些工具(例如,
计算机测量设备使用的平衡气缸锁紧装置或连接信号电缆)可能导致机器人退出
不正常的行为。
确保所有这些工具在维护完成后被移除。
2.3.3 保持跟踪历史记录
创建历史故障日志!
在某些情况下,特殊安装可能会造成其它安装情况下不会出现的故障。因此,制定每
种安装的图表可能会给故障排除人员提供巨大的帮助。
为方便故障排除,故障情况日志具有以下优点:
• 它可以让排除故障者看到原因和结果的规律,这些规律在每个单独的错误中可
能并不明显。
• 它可指出在故障出现之前发生的特定事件,例如正在运行的工作周期的某一部
分。
检查历史记录!
确保始终查阅历史日志(如有使用)。另外记住,请咨询问题第1次发生时正在工作
的操作员。
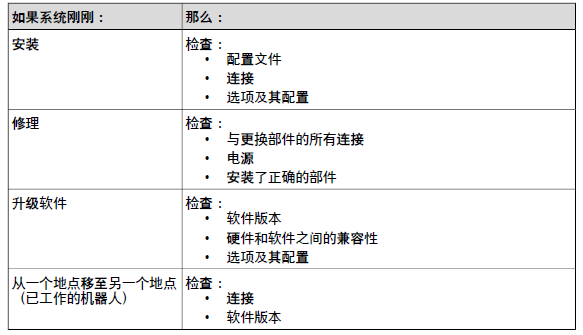
故障发生在什么阶段?
在故障排除过程中检查什么,很大程度上取决于故障发生时机器人是否刚刚安装
吗?
下表是在特定情况下检查的提示:
以上内容转载于网络
更多:ABB机器人
- 下一篇:ABB机器人创建信号及关联信号步骤
- 上一篇:ABB机器人电缆检查及更换